本文核心内容是智元在ICRA 2026同期主办的AGIBOT WORLD CHALLENGE 2026具身智能赛事收官,各赛道比赛结果已经正式公布,核心干货信息整理如下:
1. 赛事基本情况:本次赛事吸引全球27个国家及地区的526支产学研团队参赛,设置推理-操作、世界模型、全身控制三大技术赛道,采用线上标准化评测加线下真机验证的模式,主办方提供开源数据、仿真平台和机器人硬件作为赛事研发基础。
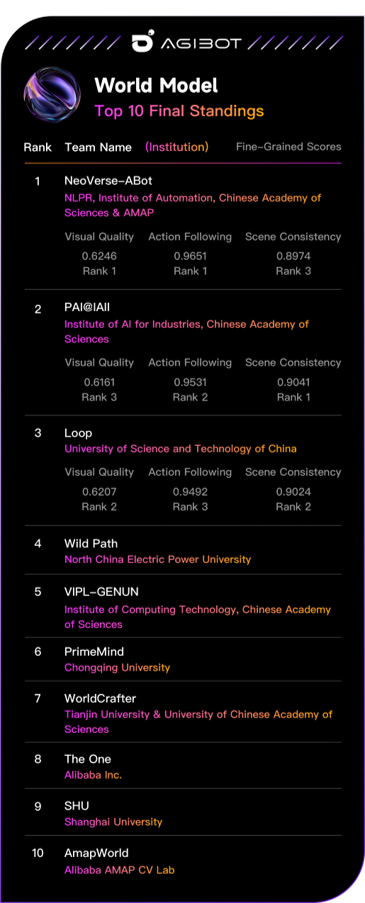
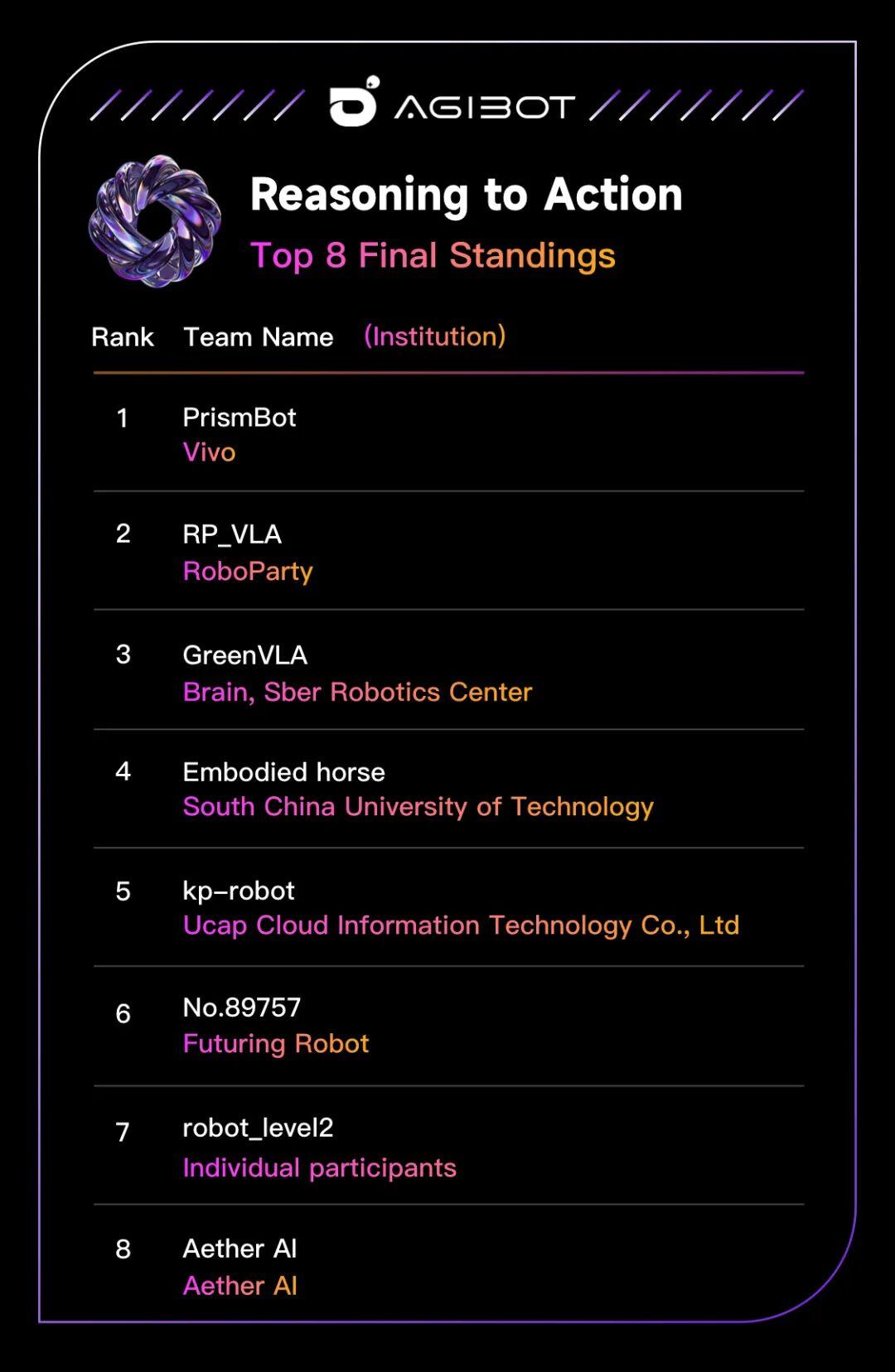
2. 各赛道获奖结果:世界模型赛道冠军为中科院自动化所联合高德组建的团队,推理-操作赛道冠军为vivo团队,全身控制赛道冠军为小米机器人团队,超百支队伍通过官方基准考核线。
3. 赛事后续安排:智元后续会上线常态化仿真打榜服务器,持续迭代评测基准和工具链,开放相关资源和全行业合作,降低行业研发门槛。
本次赛事为人形机器人领域的品牌商提供了技术趋势和品牌布局的干货参考,具体内容如下:
1. 技术与消费趋势参考:当前具身智能人形机器人行业的核心研发方向聚焦推理操作、世界模型、全身控制三大领域,行业核心痛点是仿真训练结果无法直接适配真实环境,真实场景下的任务执行稳定性已经成为技术落地和产品竞争的核心指标。
2. 品牌营销参考:本次赛事作为ICRA官方竞赛,吸引了全球顶级产学研团队参与,品牌参赛并取得名次可以快速打造自身技术品牌影响力,对接全球前沿研发资源。
3. 研发成本优化参考:智元开放了开源数据、仿真平台、真机硬件等公共研发资源,品牌可以依托这类资源降低自身算法研发和测试的成本,加快产品落地节奏。
针对人形机器人赛道的从业卖家,本次赛事透露出的机会和干货信息整理如下:
1. 赛道机会提示:当前具身智能人形机器人已经进入落地验证阶段,商超等真实消费场景的移动操作需求已经成为核心测试方向,对应场景的落地产品存在明确的增长机会,提前布局相关技术的卖家可获得先发优势。
2. 可用资源整理:智元开放了开源数据集、Genie Sim 3.0仿真平台、精灵G2真机硬件等资源,后续还会上线常态化仿真打榜服务器,中小卖家可以借助这些公开资源,不用自行投入高额成本搭建测试环境,大幅降低研发门槛,加快算法迭代速度。
3. 技术方向提示:当前产品落地的核心门槛是仿真结果到真实环境的稳定性,卖家需要重点提升机器人对复杂多变物理环境的适应能力,这是中小卖家实现弯道超车的核心方向。
对于人形机器人产业链相关工厂,本次赛事透露出的干货信息整理如下:
1. 产品生产设计需求:当前人形机器人研发越来越依赖标准化的真机测试环节,对标准化的人形机器人硬件本体、统一硬件底座的需求大幅提升,本次赛事统一采用精灵G2人形机器人作为测试载体,也印证了标准化硬件是行业研发的共性需求。
2. 可对接的商业机会:行业对开源测试资源、公共研发平台的需求非常旺盛,智元后续会持续迭代全栈工具链,围绕硬件、数据、仿真平台开放生态合作,相关零部件生产、整机组装的工厂可以对接头部企业的生态需求,获得稳定长期的商业订单。
3. 数字化转型启示:人形机器人研发已经形成“数据—仿真—真机”的全链路数字化研发流程,工厂可以参考这种标准化研发模式,推进自身生产研发的数字化升级,借助统一工具降低研发测试成本,提升新品迭代效率。
对于具身智能人形机器人领域的服务商,本次赛事透露出的行业干货整理如下:
1. 行业发展趋势:当前具身智能评测已经从早期关注单一模型指标,逐步延伸到真实场景下的任务执行稳定性、物理环境适应性、长程任务完成能力等多维度,行业对标准化、可复现、可横向对比的评测服务需求正在快速增长,市场空间较大。
2. 行业核心客户痛点:目前人形机器人研发的普遍痛点是整体研发成本过高,中小团队和初创企业难以获得标准化的真机测试环境,同时仿真环境的测试结果和真机实际表现差距较大,算法从仿真到真机的迁移难度很高,困扰大量研发团队。
3. 可切入的解决方案方向:服务商可以围绕“数据—仿真—真机”的全链路研发评测流程,搭建标准化的公共测试服务平台,为中小研发团队提供低成本的按需测试、验证服务,精准匹配行业当前的痛点需求。
对于机器人领域的行业平台商,本次赛事给出的运营参考干货整理如下:
1. 当前行业对平台的核心需求:全球研发团队都需要统一标准、可复现、覆盖从数据到仿真再到真机的全链路研发测试平台,以此降低研发门槛,目前市场上这类符合要求的标准化公共平台供给不足,存在布局机会。
2. 可参考的平台运营模式:本次智元的赛事采用线上自动化评测加线下真机验证结合的模式,依托自研的两项评测基准,统一测试硬件,有效解决了过往仿真评测和真机落地脱节的问题,这种评测模式值得平台参考。
3. 后续运营方向提示:平台在举办赛事后,可以将沉淀的资源转为常态化运营,上线公开打榜服务器,持续新增测试任务和多元化评测基准,不断吸引产学研团队入驻丰富生态,同时要侧重贴近真实落地场景设计任务,规避只关注仿真指标不看重落地能力的方向偏差。
对于具身智能领域的研究者,本次赛事透露出的研究参考干货整理如下:
1. 产业最新动向:当前全球具身智能研发聚焦三大核心方向,分别是任务理解到动作执行的决策、物理世界交互预测建模、机器人连续动作的全身协调控制,三个方向对应人形机器人落地的核心技术环节,整个行业已经从纯技术演示转向关注真实场景的落地能力,产学研结合的研发模式越来越普遍。
2. 领域新发现的核心问题:目前具身智能评测的核心难点是仿真环境的高分表现无法等价于真实机器人的稳定执行,真实环境中的物体位置、抓取误差、遮挡等大量不可控变量都会影响任务完成率,标准化的适配全链路的评测体系仍在构建过程中。
3. 后续研究方向参考:本次赛事开放的评测基准、开源数据集、仿真平台资源,以及线上线下结合的评测模式,为后续研究提供了可复用的基础框架,同时也指出了仿真到真机迁移、真实场景任务稳定性等核心研究方向,供研究者参考。
返回默认